V současné době je nejrozšířenějším principem získání přehledu o situaci ve vzdušném prostoru sekundární radiolokace. Pozemní radar vysílá na frekvenci 1030 MHz dotazy a odpovídač na palubě letadla na tento dotaz na frekvenci 1090 MHz odpovídá. Z času odeslání a příjmu dotazu/odpovědi, otáčení antény radaru a módů (A/C/S) se získává celkový přehled o aktuální vzdušné situaci.
Princip sekundární radiolokace je znám od druhé světové války a i přes nespornou efektivitu, kvalitu a celosvětové rozšíření, je potřeba přemýšlet nad nástupcem této technologie. Sekundární radiolokace je drahá na provoz a instalaci, má omezené možnosti vývoje a rozšiřování ve stále houstnoucím vzdušném prostoru a má i limity v oblasti pokrytí a kapacity obsloužených letadel.
Je nereálné, aby byly do oblasti řízení letového provozu zaváděny nové koncepce skokově, proto se koncepce přehledu o vzdušné situaci vydává směrem, který se opírá o současně zavedený princip sekundární radiolokace, ale snaží se o to, aby byl v řetězci postupně vynechán samotný radar (nejdražší a nejkomplikovanější prvek). Ten by byl nahrazován pouze pozemními přijímači, které by monitorovaly příchozí signály od jednotlivých letadel.
V budoucnosti se uvažuje o nahrazení SSR těmito systémy:
Pod zkratkou MLAT se skrývá pojem multilaterace, která na principu TDOA - rozdílu času příchozích signálů (odpovědí na dotazy SSR, IFF - identifikace "přítel/nepřítel", ADS-B) na jednotlivá přijímací čidla v síti, vyhodnocuje hyperbolickou metodou polohu letadla v prostoru.
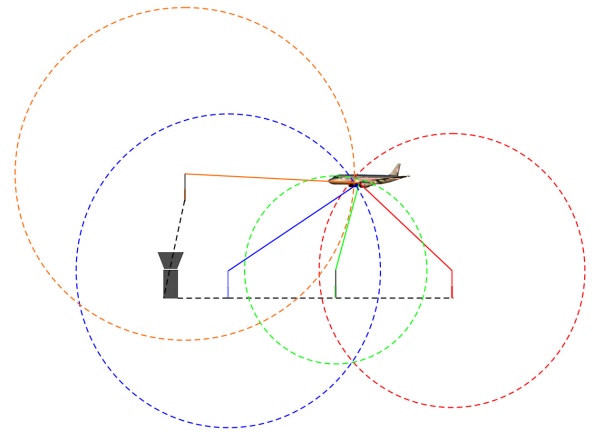
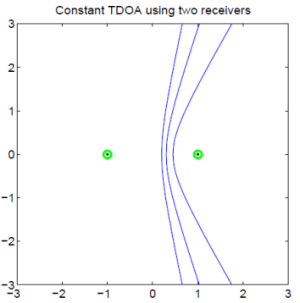
Princip hyperbolické navigace, který byl používán už u systému LORAN-C byl založen právě na TDOA (time difference of arrival). Ten měřil rozdíl času příchozích signálů ze sítě pozemních, časově synchronizovaných vysílačů. Vzhledem k tomu, že vysílače nejsou ve stejné pozici, i signál, který dorazí k přijímači, přijde v různém čase. Z rozdílu času a známé rychlosti šíření elektromagnetických vln v prostoru pak vypočítáme hyperbolu, na které se musí cíl nacházet. Problém je v tom, že se může nacházet v jakémkoli místě hyperboly. Abychom určili polohu přesně, musíme přidat ještě druhou dvojici vysílačů, jejich výpočet hyperboly přesně určí polohu cíle.(viz. video dole)
Multilaterace je založena na stejném principu, pouze s tím rozdílem, že vysílače umístěné na palubě letadla vysílají signál a na zemi je síť časově synchronizovaných přijímačů.
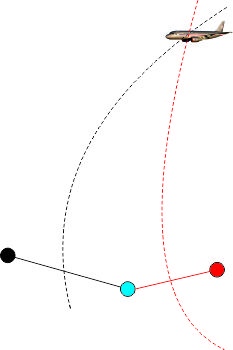
Na pozemní síť přijímačů o známé a neměnné poloze, přichází z paluby letadla signály s rozdílným časem, ze kterých se vypočítá poloha cíle.
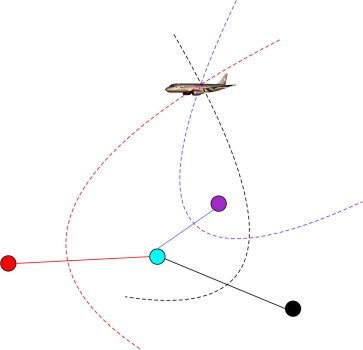
Pokud bychom měli pouze dva pozemní přijímače, dostaneme nejednoznačnou informaci o poloze. Přidáním třetího přijímače pak dostáváme 2D polohu cíle (viz. obr. 1 výše) a pro zajištění 3D polohy musíme mít 4 a více přijímačů (viz. obr. 2 výše).
TDOA je zatím nejpřesnější a nejjednoznačnější metoda detekce cíle. Největší slabinou systému je nedodržení časové synchronizace, protože chyba času 1us vyvolá chybu v řádech metrů.
Zajímavost
Zajímavou roli v oblasti multilaterace/pasivních sledovacích systémů hraje i Česká/Československá republika. Tým okolo vedoucího Doc. Ing. Vlastimila Pecha, CSc. vedl výzkum v oblasti pasivních sledovacích systémů už v 50. letech a z jeho práce těžíme dodnes. Mezi nejznámější produkty patří PSS KOPÁČ, TAMARA, RAMONA a nakonec i VĚRA. (Pro více informací viz. historie PSS). V současné době se tak například na letišti Ostrava-Mošnov používá civilní verzi PSS Věra a firma ERA Pardubice vyvíjí i "klasický" MLAT systém.
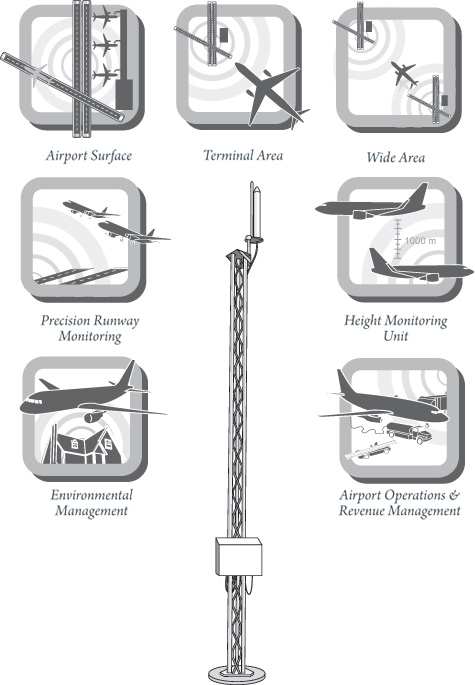
Aplikace a využití
přehled o pozemním provozu
přehled o vzdušné situaci v TMA
monitorování výšek letu
přesné monitorování paralelních RWY
přehled o vzdušné situaci ve WAM (wide area multilateriation)
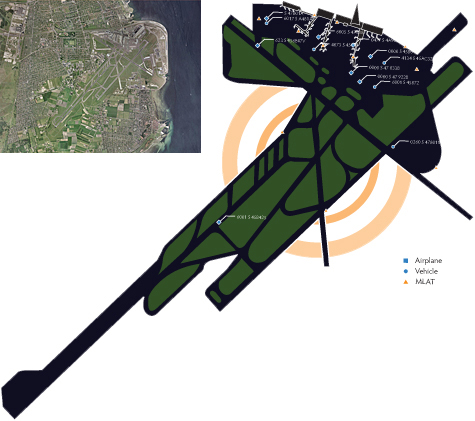
1. přehled o pozemním provozu
Využití MLAT v projektu monitorování pohybu po pozemních plochách letiště (A-SMGCS Advanced Surface Movement Guidance and Control System). (Letiště Kodaň, převzato z http://www.multilateration.com/applications/surface.html)
Tento princip by měl nahradit pozemní přehledový radar (SMR - surface movement radar), který je například limitovaný zástavbou letiště nebo silným deštěm. Správným rozložením sítě přijímačů MLAT by se tyto nedostatky odstranily.
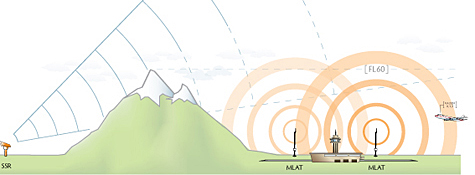
2. přehled o vzdušné situaci v TMA
Síť čidel založená na principu MLAT odstraňuje některé významné nedostatky "klasické" sekundární radiolokace. Například v oblastech hornatých terénů je sekundární radiolokace neefektivní. Z principu funkce není možné, aby radar viděl za hory a
budovat v hornatém terénu síť radarů by bylo velmi neekonomické.
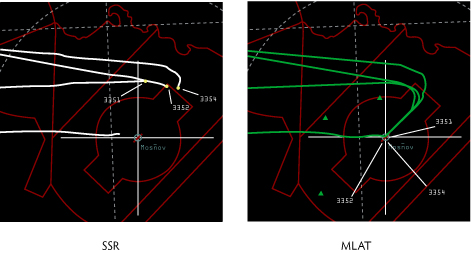
MLAT takovou situaci řeší například na výše zmiňovaném letišti v Ostravě-Mošnově, které je obklopené horami a pod FL60 není pokryté radarem.
(Převzato z:http://www.multilateration.com/pioneers/czech-ans/going-where-radar-cannot.html)
3. monitorování výšek letu
Po zavedení RVSM (reduced verticalseparation minimum), bylo nutné najít systém, který by kontroloval správnou funkci palubního vybavení RVSM.
4. přesné monitorování paralelních RWY
Přesnost měření pomocí MLAT zvyšuje kapacitu přistávajích letadel na paralelních drahách.
5. přehled o vzdušné situaci ve WAM
Celosvětově není prozatím MLAT zaváděn na větších území, ale budoucí koncepce počítá s tím, že by MLAT úplně nahradil současné SSR pokrytí. Z ekonomických důvodů tomu zatím tak není, ale jsou místa, kde se
tato koncepce zavádí paralelně se SSR. Příkladem může být polovina FIR Praha, kde se buduje MLAT WAM. Přijímací stanice jsou v takové oblasti od sebe vzdálené až do 100km.
Například na letišti Václava Havla v Praze je kromě dvou SSR zaveden MLAT jako třetí plnohodnotné čidlo pro získávání informací o pohybu ve vzdušném prostoru.
Nevýhody MLAT u WAM
Je nutné zabezpečit velký datový tok mezi přijímači.
Napájení jednotlivých přijímačů v krajině.
Nároky na vysokou synchronizaci času.
LORAN-C
Multilaterace využívá v radionavigaci dlouho známou techniku, která je známá jako hyperbolická navigace, a která je používaná už od II. Světové války. Nejvýznamnějším představitelem radionavigačního systému, který tuto techniku využíval, byl systém LORAN-C.
Pozn.: Rozdíl mezi TOA a TDOA.
TOA - máme síť pozemních vysílačů, které nejsou časově synchronizované, stačí, že známe přesnou polohu a čas vyslání signálu jednotlivými vysílači. Rozdílem mezi časem příjmu a vysláním dostaneme polohu na kružnici. Pokud protneme 3 kružnice, dostaneme přesnou polohu ve 2D prostoru.
TDOA - síť vysílačů/přijímačů musí být časově synchronizována. Přijímač pak vyhodnocuje rozdíl mezi příchozími signály.