ADS-B
V současné době je většinou přehled o vzdušné situaci založen na principu sekundární radiolokace (SSR), kdy pozemní radar vysílá dotazovací impulzy na kmitočtu 1030 MHz a letadlo na tento dotaz odpovídá na frekvenci 1090 MHz. V odpovědi je zakódována informace o výšce a identifikační kód, takzvaná „alfa“, a v závislosti na odpovídači i doplňující informace k letadlu.
Sekundární radiolokace byla a stále je velmi dobrou, zavedenou metodou pro získávání přehledu o vzdušné situaci ve vzdušném prostoru, ale s nárůstem letového provozu se tato metoda stává „zastaralou“, zejména pro koncepce budoucího řízení letového provozu. Budoucnost by měla být v programech SESAR (EU) a NextGen (USA), která klade důraz na vyšší efektivitu, minimalizaci ceny infrastruktury, vyšší bezpečnost, přesnost přehledové situace, ale zároveň má i vyšší nároky na palubní vybavenost letadel a pozemního zařízení. Jedním z takových systémů, který výše uvedené požadavky splňuje je ADS-B.
ADS - rozdělení
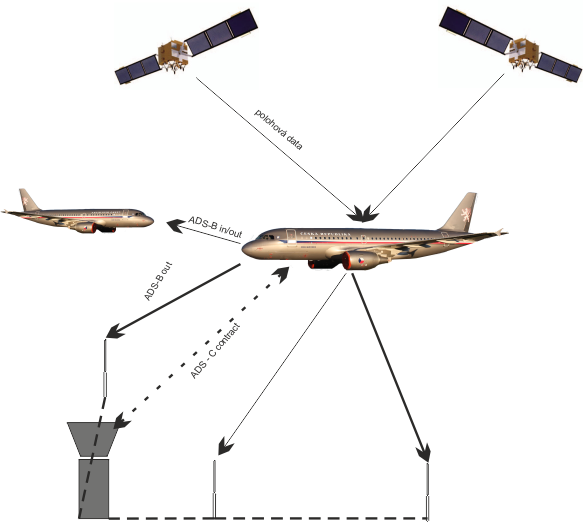
Automatic Dependent System – je systém pro přehled o vzdušné situaci založený na principu předávání dat a polohy z letadla na pozemní přijímače pomocí standardních komunikačních linek (1090 MHz, VDL, atd.), a dále také ostatním letadlům ve vzdušném prostoru.
ADS rozdělujeme na:
ADS-A a ADS-C
Jde prakticky o stejné označení jedné věci - ADS založené na principu adresace, kdy je navázán komunikační spoj mezi letadlem a pozemním stanovištěm řízení letového provozu přes datalink. ADS-C má podle internetových zdrojů posílat automaticky polohová data z GNSS přes ACARS a ADS-A pak nespecifikovaná polohová data přes domluvený datalink. Využití bude například při oceánských letech, kdy takto svázané letadlo bude automaticky po určitém čase odesílat pozemnímu pracovišti informace o poloze. Informace o poloze se můžou posílat:
- Periodicky
- Na vyžádání ŘLP
- Při určité události – přelet navigačního bodu, změna výšky, odchýlení od trati
Jinak využívá stejných zařízení a principů jako ADS-B.
ADS-B OUT
ADS-B out – Polohová data získaná z GNSS, identifikační data, rychlost a výška jsou periodicky odesílána datalinkem z paluby letounu na pozemní síť přijímačů ADS-B a zpracovávána do podoby vhodné pro ŘLP. Díky použití GNSS jsou data o poloze přesnější než u „klasické sekundární radiolokace“.
ADS-B IN
Data nejsou odesílána na pozemní síť, ale jsou distribuována k dalším letounům v okolí. Přes tento datalink mohou být odesílána data uvedená u ADS-B out, data ATSAW (Airborne Traffic Situation Awareness – situace o vzdušné situaci v okolí letounu), data o vertikální a horizontální separaci, počasí, notamech apod. Nejznámějším využití je v systému TCAS.
ADS-B, princip funkce s módem S
"Klasické" sekundární radary, které přes SSR kódy identifikují letadla a výšku letu, se postupně nahrazují radary, které podporují mód S. Mód S využívá k identifikaci
jedinečné adresy paubního odpovídače a umožňuje ve svém datovém bloku mimo identifikační data vysílat i doplňková data. Právě tu část pro doplňková data, nazvanou "extended - rozšířená", využívá ADS-B pro polohová data z GNSS. Více informací o módu S je pak na stránkách
radartutorial.eu
V odpovědi módu S jsou zakodována tato data:
- Poloha
- Barometrická výška
- Indikace kvality
Identifikace letadla:
- Unikátní 24 bitová adresa letadla
- Identifikace letadla
- Kód módu A
- Stav nouze
- SPI (special position indicator)
TCAS a ADS-B IN
TCAS (Traffic alert and collision avoidance system) je protisrážkový systém, který spadá pod myšlenku ACAS (airborne collision avoidance system), který může využít i informace vysílané přes ADS-B, aby zvýšil svou efektivitu. Tato metoda se nazývá
"hybrid surveillance" (hybridní informace o přehledové situaci) a snižuje četnost dotazů systému TCAS, což má za následek snížení zatížení frekvence 1030/1090 MHz. ADS-B jako takové
neplní přímo funkci TCAS, není schopné předávat posádce příkazy, ale slouží pouze pro zvýšení efektivity TCAS, případně dokáže zobrazit jiná letadla na vlastním mapovém podkladu. ADS-B pak vysílá každou sekundu informace o poloze.