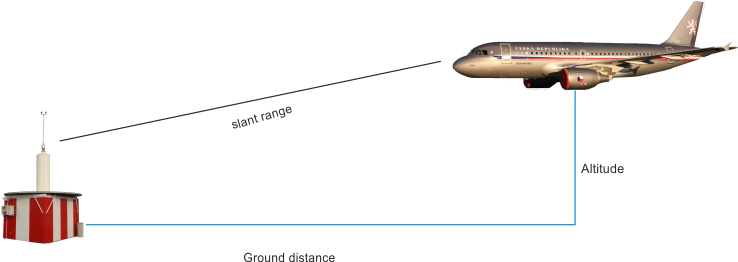
DME (distance measuring equipment) is a radionavigation device that indicates the slant range between an on-board interrogator and a ground transponder. The on-board interrogator also can calculate the time to reach ground beacon and ground speed. Pilot sets the VHF DME frequency on the on-board interrogator, which is paired with the frequency of DME ground transponder (UHF range), and "only" waits for a response and calculation of the slant range.
Division
We divide the DME device according to the radiated spectrum to:
DME/W (wide - – widely radiated spectrum)
DME/N (narrow - narrowly radiated spectrum). Currently, all DME/W devices are replaced by DME/N devices.
DME/P (pop - for precision landing approach), which is a part for measuring slant range in the MLS system (the spectrum is the same as for DME/N).
We also divide the DME into W, X, Y, and Z modes, which extend the number of usable channels (W, X, Y and Z modes are only for DME P - more ICAO Annex 10 / I, chapter 3.5.4.4.1).
Use
DME is used to secure navigation information in flight paths and TMAs. It is often used in cooperation with other radionavigation devices - most often as VOR/DME, ILS/DME and TACAN (VORTAC) or as a radionavigation point alone.
DME beacon network is due to its accuracy used for RNAV navigation, allowing aircraft (which are equipped with navigation systems that fulfill a given measurement accuracy) to fly on any track outside corridors.
It can also be used in cooperation with MLS landing systems where it is necessary to ensure the accuracy of DME/P in two phases - phase IA (initial approach) and FA (final approach) (see below).
Note.: If the DME is used in the ILS/DME configuration and the DME is used to indicate the distance to the touchpoint, it can be set by offset (DME beacon is not placed in the middle of RWY at touchpoint).
Frequency and channels
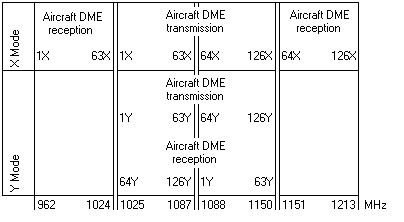
The DME operates on frequencies from 962 to 1213 MHz with 252 channels, divided into 126 channels for X mode and 126 for Y mode (see above). The frequencies on which the DME works are divided to the frequency for interrogation (which are paired to response frequency).
For interrogation pulses from aircraft are used frequencies from the range 1025 to 1150 MHz (the on-board interrogator is set to VHF frequency paired with the UHF frequency of the ground beacon) and for the response pulses then the whole frequency range from 962 to 1213 MHz.
Frequencies of the interrogation and response pulses are always shifted up or down for 63 MHz. Whether the response shifts 63 MHz up or down depends on whether the DME is operating in X or Y mode (see Table).
As can be seen in the table, the "dividing" frequencies are 1087 and 1088 MHz. If the DME is in X mode, and the on-board interrogator frequency is in the range from 1025 to 1087 MHz, 63 MHz is deducted from the frequency of interrogation (the resulting transponder frequency on the ground will be in the range from 962 to 1024). However, if the interrogator frequency is between 1088 and 1150, the 63 MHz frequency is added to the interrogator frequency. In Y mode, it's the opposite. If the interrogator frequency is between 1088-1150 MHz, the 63 MHz response frequency is deducted from this frequency and if the interrogator frequency is in the range of 1025 - 1087 MHz, the 63 MHz is added.
Example:
We have a DME ground beacon that works in Y mode at 1042 MHz. Calculate what frequency must be set on the aircraft and determine what channel it is.
According to the table, we find that in mode Y and for the frequency 1042, it is a channel 81Y. The “dividing” frequency is 1087MHz, and since we know that for Y mode: If the ground frequency of the DME operating in the Y mode is in the range from 1025 to 1087 MHz, then we add 63 MHz to that frequency to get the resulting frequency of the on-board interrogator. If we apply this, we get the resulting frequency 1042 + 63 = 1105 MHz.
Table for defining frequency of ground beacon
Mode
Frequency of interrogator 1025 - 1150
Mode X
to 1087 MHz = -63MHz
over 1088 MHz = +63MHz
Mode Y
to 1087 MHz = +63MHz
over 1088 MHz = -63MHz
As stated in the beginning, pilot sets the VHF NAV frequency on the DME on-board interrogator, he doesn’t directly set the UHF DME operating frequency but he sets the VHF NAV frequency paired with DME (see Table).
DME Channels
Pairing
VHF NAV frequency (MHz)
1-16
non paired
134,4 – 135,9
17-56
odd channels with ILS, even channels wit VOR
108 – 112
60-69
non paired
133,3 – 134,2
57, 58, 59, 70 - 126
VOR
112 – 117,9
And to make it not quite simple, VHF NAV frequencies ending with "0" are for X mode and those ending with "5" are for Y mode. (DME in X mode are tuned to 100 kHz in 100 kHz VHF channels and in Y mode at 100 kHz in 50 kHz VHF channels).
Note.:If MLS with DME/P is used then DME is paired with MLS frequency range 5031-5090.7 MHz (see below).
Function principle
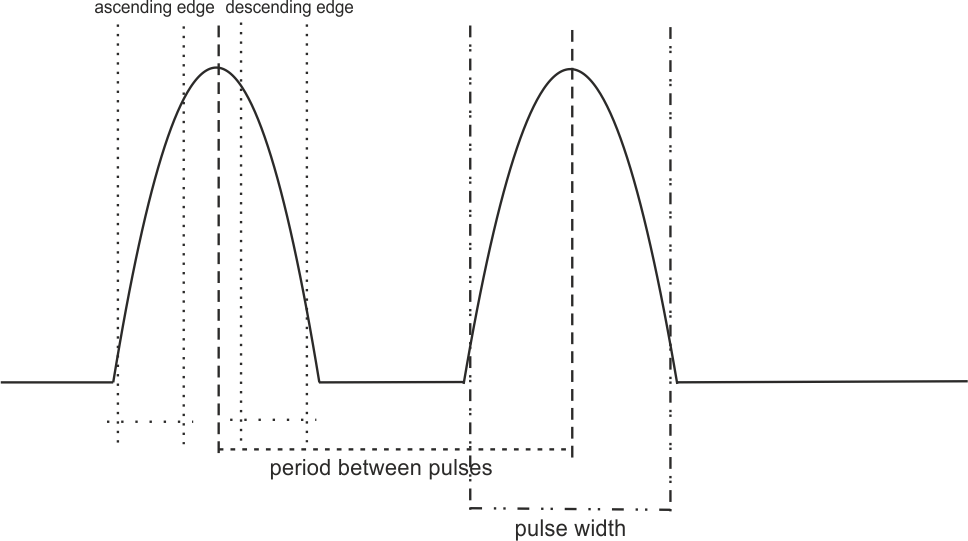
The DME works with interrogations and responses principle when the interrogations are transmitted from an on-board interrogator and the ground radio responds. As it can be decoded from word "radionavigation", it is a device that operates on the principle of transmitting and receiving electromagnetic pulses. These impulses are in the case of DME in a pair and are called double-pulses. Double pulses have specific characteristics such as pulse width, length of leading and descending edges, amplitude, period between pulses and delay between interrogation and response.
Pulse characteristics
Leading edge - < 3µs
Pulse width - 3,5±0,5µs
Descending edge - 2,5µs (< 3µs)
The period between double-pulses determines whether DME operates in X or Y mode (or W and Z for DME/P). For example, if the on-board interrogator asks with a period of 12μs between two pulses in a double-pulse, and the ground transponder responds with a period of 12μs and a delay of 50μs, then it is DME/N in the X mode (see table).
DME/N
X
Y
Interrogation
12µs
36µs
Response
12µs
30µs
Delay
50µs
56µs
The distance calculation is based on the measurement of the time between interrogation and respond from ground station according to:
D = T-Td / (12.359µs)
Where:
D – distance of an aircraft to ground beacon
T – time between sending interrogation and receiving response
Td – delay of transponder (for X mode = 50µs, modeY = 56µ)
12.359e-6 is a time in which speed of light overcome 1 NM two-way (1852/3e8*2)
Function principle in a nutshell
The pilot tunes frequency that is from the VHF NAV range and is paired with the DME frequency in UHF.
The on-board interrogator transmits interrogations that have, depending on the DME (X / Y) operating mode, 12 or 36 μs period between pulses in double-pulse.
Ground beacon/station receives a double-pulse, adds delay of 50 or 56 µs (depending on X or Y mode) and sends the response back to the interrogator. Interesting is that the carrier frequency of the interrogator and the transponder are shifted 63 MHz "up" or "down" depending on mode (X/Y).
The on-board interrogator evaluates the incoming signal and, if the signal is for the specific interrogator, the internal circuits evaluate it and display it on the relevant display. From the time between interrogation and response, you can calculate the time to reach the ground beacon and ground speed.
How do DME distinguish aircraft from each other? Jitter
The function principle described above definitely works for one aircraft, but how does the DME works when more than one airplane come into its range? How does it distinguish which interrogation belongs to which response when the interrogations and responses are in characteristics identical?
The solution is the so-called Jitter through which we can distinguish and correctly match interrogations and responses from more planes.
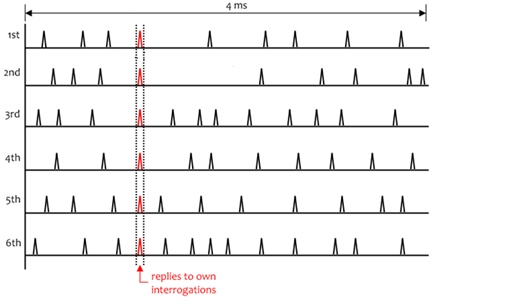
The airplane arriving in the DME workspace sends interrogations in the form of double-pulses with randomly selected frequency - the jitter, which is the same throughout the whole broadcast, waiting for the responses. The ground beacon is responding with the same jitter/frequency. On-board interrogator predicts when answers to his questions should come and "seeks" responses that have the same frequency as his original interrogations.
While the on-board interrogator is "searching for" the right responses to his interrogations, he is in the so-called search mode. In this mode, the interrogator sends about 150 ppps (pulse pairs per second), and according to the predicted times when he should return the answers/responses, it searches for the same response to his interrogations according to the jitter. After the interrogator finds his answers (approximately 1s), he goes into track mode, which only "keeps” communication with ground station with a 30ppps according to the jitter.
If another airplane arrives in the area where the DME signal is secured, it sends its interrogations with another, randomly selected jitter. This will divide the responses from different planes.
Note:Plane 1 sends interrogations with a random "blue" jitter, and the DME responses it with a "purple" jitter with an identical frequency. The same applies to aircraft 2 with a random "red" jitter and “black” responses. Below is an explanation of finding responses to your own interrogations.
How many aircraft can DME actually serve?
Different sources give different numbers of aircraft that can be served by the DME. DME from Fernau Avionics is said that can serve up to 100 aircraft. DME from THALES is said to be capable of serving up to 200 aircraft. It will probably be related to how many responses the device can send per second.
Example:
According to ICAO recommendation ANNEX 10/1 3.5.4.1.5.5, ground equipment should be capable of serving 100 aircraft. Therefore, it should be able to send 2,700 ppps (the probability that each aircraft will receive enough responses for the distance calculation (on board)). This is based on this consideration:
If in DME range would be just aircraft in search mode, than DME would be able serve only about 18 aircraft. Aircraft number = ppps/search mode = 2700/150 = 18
If in DME range would be just aircraft in track mode, then DME device would be able to serve about 90 aircraft. Aircraft number = ppps/track mode = 2700/30 = 90
On average 54 aircraft can be served.
Fernau Avionics declares capability of up to 5000 ppps. If we use the same logic as described above, we will get an average of about 98 served aircraft. So, if THALES declares its ability to serve up to 200 aircraft, it must be able to transmit about 10000 ppps!
What if there is only little/many aircraft? Squitter
The total number of responses is constantly changing according to the number of interrogating aircraft (and the random noise that is also triggered by the transponder). In order to avoid quick changes in the number of transmitted responses (power), DME automatically drives and generates noise at the output of the receiver - Squitter. Squitter creates false interrogations to which DME responds.
For example, if there are 10 aircraft in the work area, DME creates its own "false" interrogations to ensure constant power. But when there are for example 90 aircraft, DME will suppress squitter and responds only to real interrogations.
If the DME approaches the nominal number of responses (> 90% of the DME load), DME automatically reduces sensitivity and those aircraft that are the most distant are not served. This ensures that the DME is not overloaded.
DME with MLS
The description above is related to the use of DME/N in which only X and Y modes are used. However, if we use DME as a part of the MLS landing system, it is necessary to ensure the accuracy of the DME in P mode. The letter P indicates the "increased accuracy" of the measurement. The defined accuracy is divided, depending on the landing phase, at phase IA (initial approach) and FA (final approach/final). In addition to increased accuracy in distance measurement, emphasis is also placed on pulse quality and DME/P also works in different modes (X, Y, W, Z). Those modes have different periods between double-pulses and delays.
DME/P
X
Y
W
Z
Interrogation
IA 12µs/ FA 18µs
IA 36µs/ FA 42µs
IA 24µs/ FA 30µs
IA 21µs/ FA 27µs
response
IA a FA 12µs
IA a FA 30µs
IA a FA 24µs
IA a FA 15µs
Delay
IA 50µs/ FA 56µs
IA 56µs/ FA 62µs
IA 50µs/ FA 56µs
IA 56µs/ FA 62µs
Frequency of DME/P and MLS
If MLS with DME/P is used then the DME is paired with MLS frequencies from 5031-5090.7 MHz range.
impulse characteristics
Leading edge - < 1,6µs, u FA 0,25±0,05µs
Pulse width - 3,5±0,5µs
Descending edge - 2,5µs (< 3µs)
Disadvantages of using DME?
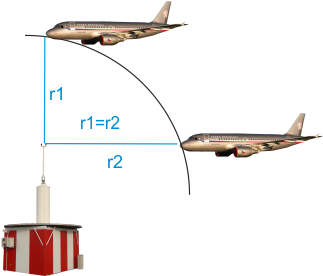
With increasing distance, measurement inaccuracy is also increasing
The slant range is the same at multiple points. If the plane is 1 km above the beacon, the distance will be 1 km. The same distance will be measured even though I'm 0 m above the ground at a distance of 1km
The calculation of speed and time to reach beacon is inaccurate if the aircraft flies in the circle "around" DME.
Limited capacity of served aircraft
The necessity of radio visibility between the aircraft and the ground beacon.